
介绍安森美Inductive Sensing NCS32100 and NCV77320 之前,先说明什么是编码器以及为何要用编码器。
何谓编码器 (encoder)?
编码器主要是测量旋转速度、位置、角度等机械变化量,再把此变化量转换成特定电信号给处理系统的转换器功能元件或模组,是对旋转角度或位移量进行编码,之后再以类比、脉冲、数位代码信号等型式输出的装置。
为何要用编码器?
编码器所检测的机械变化量,主要是针对旋转转轴的变化量,这转轴经由马达、齿轮、叉速器等装置之后会对应到旋转速度(或车速)、长度(滚轮产出的距离)、位置(机械手臂的绝对位置)的特定数据,意即经由旋转轴心所产出的速度、长度、位置若有精密调控的需求,就有必要使用编码器。
常见的编码器型式:
常见的旋转编码器有光学式和磁性式(包含电生磁)。
光学式编码器是业界最常采用的高精度编码器,单价最高精度也是最高的,但不是此次介绍的重点。
磁性(含电生磁感应)式编码器大致分为三种:
其一是磁性编码器-主要是透过检测旋转轴心尾端永久磁铁交替的磁化N极和S极的磁极变化,将其转换为对应的电信号,并以特定形式输出,单价最低精度也是最低的,也不是此次介绍的重点。
其二是解角器Resolver(电生磁感应式编码器)-以施加弦波电压至旋转的主线圈,经由电生磁场感应到两个90度相位差的次级线圈以提供正弦和馀弦的输出信号,此方案特色是坚固耐用不怕油污及高温,常见于车载转速相关的检知。
其三是Industrial Rotary Position Sensor(安森美电生磁感应式编码器)-NCS32100 电气规格如下:
- 提供带有可编程索引的绝对位置输出
- 提供速度、温度和备用电池测量
- 支持 RS-485 界面通讯 (2.5 Mbps)
- 全精度下的最大可检测转速:6000 rpm(最高可达24位元分辨率)
- 精度降低时的最大可检测转速:60,000 rpm
- 工作电源电压范围:75 V - 5.5 V
- 通讯界面信号准位: 7 V - 5.5 V
- 低功耗电池模式消耗:2 mA(典型值)
- 全工作电流消耗 80 mA(典型值)
- 内部可编程 M0−ARM MCU 提供数据界面, 配置、和校准功能
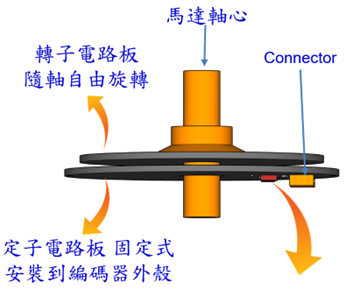
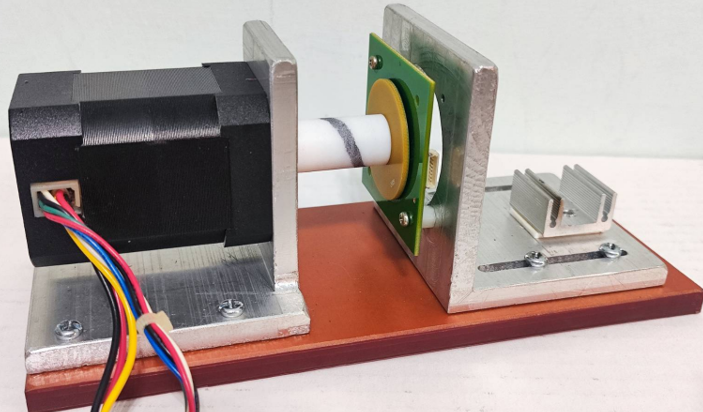
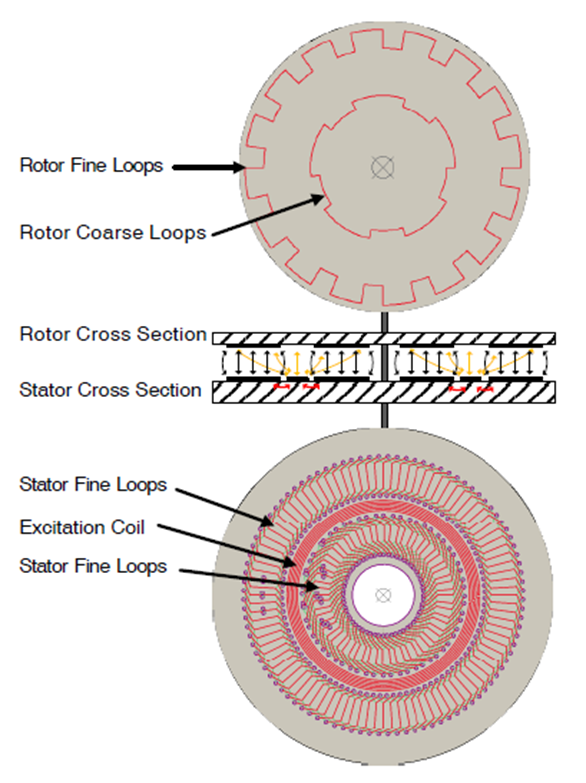
NCS32100 位置检知传感器配置结构示意图及展示板照片:
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100 线路架构示意图及说明: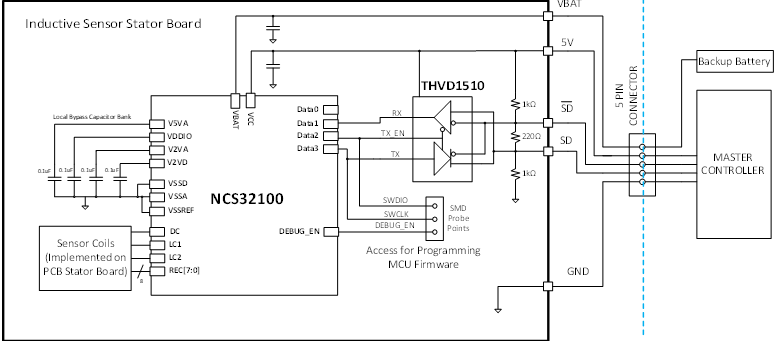
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
- 转子板上没有焊接元件,零件都在定子板上。
- 编码器 (NCS32100) 负责驱动、读取和编码来自 PCB 传感器的信号 。
- 传感器可以配置为不同的尺寸和精度。
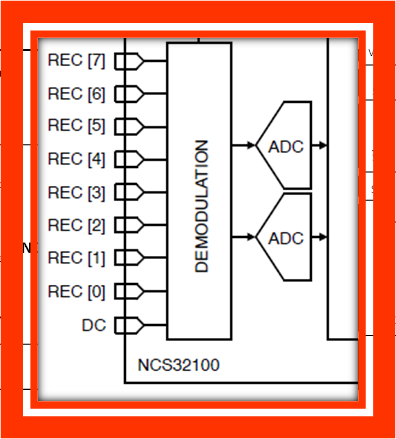
- 由8路ADC中的6路负责两组三路各相位差120度回授信号(REC 7:0 示意如下图)。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100 转子与定子的组成 :
- 上方为转子PCB,里面只有Layout形成的齿轮状环形走线,主要功能是接收定子环型LC振荡源发射出来的感应磁场进而在闭回路里产生感应电流。
- 下方为定子PCB,是4层板,上两层为环型LC振荡源(中间圆型)及内外各三组相差120度的穿层齿轮状走线做为感应定子磁场用途,下两层是NCS32100 及周遭零件或对外通讯的走线。
- 两PCB中间要求在5mm。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
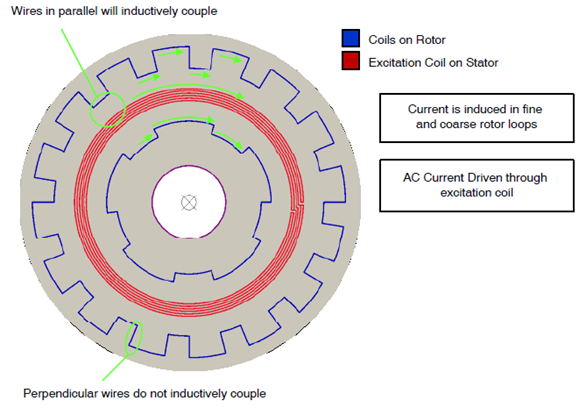
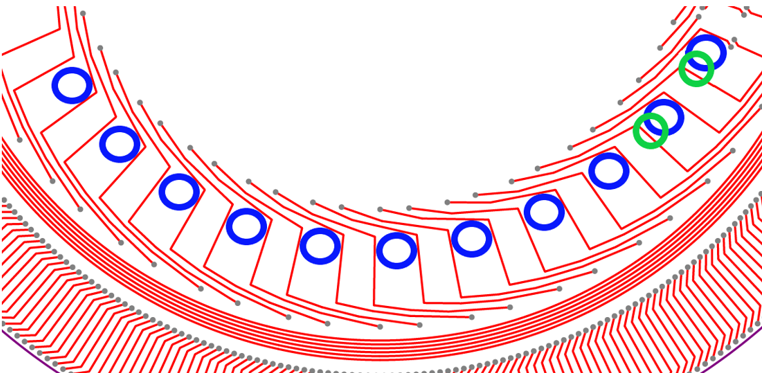
NCS32100 定子LC振荡源感应到转子说明:
- 红色代表定子上的LC振荡源线圈且作动时持续产出交流磁场。
- 蓝色代表转子上的感应环路,平行的走线才能感应/接收磁场信号进而产生环形电流。
- 内圈跟外圈有不同的分辨率会让感应信号产生具时间差的准位以利计算绝对座标。
- 绿色代表感应电流方向。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
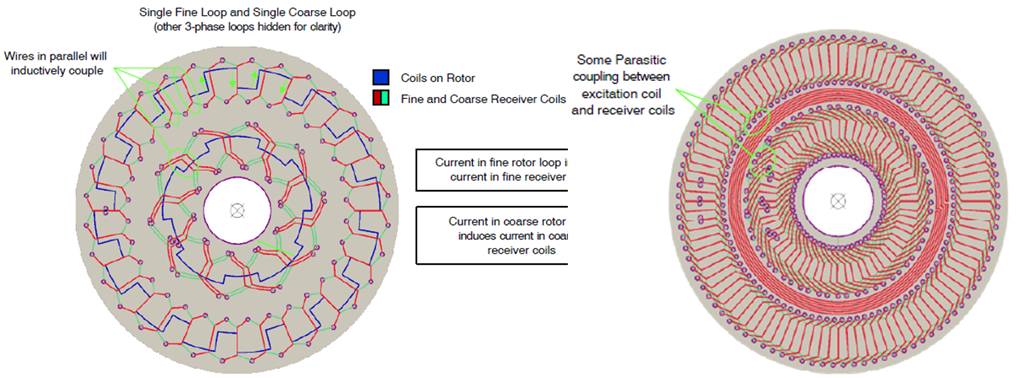
NCS32100 转子感应磁场再感应到定子线圈说明:
- LC感应源将信号感应到转子的平行走线,之后转子的垂直走线再将信号感应回定子的垂直走线接着回到NCS32100 ADC 脚位。
- 定子的感应线圈需配合转子垂直走线的电流方向,但又必需考虑到三组线圈的走线,所以在转折时方向改走PCB的第二层,这是搭配间距计算出来的。
- 整体来说就是平行感应出去,垂直感应回来定子PCB上的ADC走线。
- 把6组定子感应线圈同时呈现,就会清楚看到全都符合与转子回传走线平行的垂直走线。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
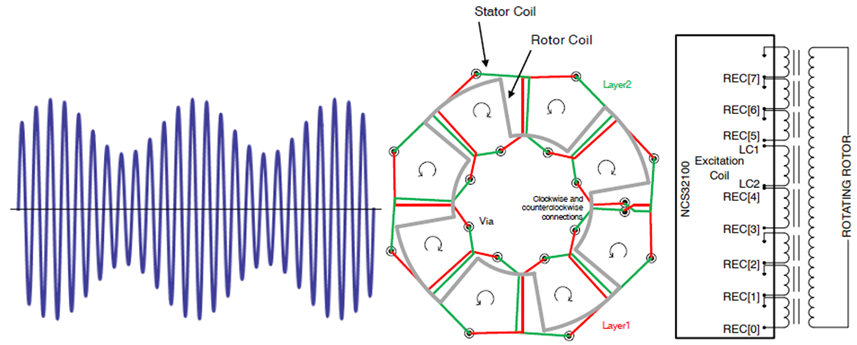
- 转子所呈现的齿轮状在不同的缺口位置会有不同方向的电流涡流,但依封闭线圈来说电流方向是一致的。
- 配合齿轮状线圈的电流方向,定子走线必需有对应近似重叠的形状以利接收/感应磁场。
- 右图是单一组感应线圈示意图,但为了满足有相位差的信号以利计算绝对座标,所以必需有三组形状相同的走线,而反方向走另一层则是有效的解决方法。
- 每组定子感应线圈大致会得的像左图的电压信号。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
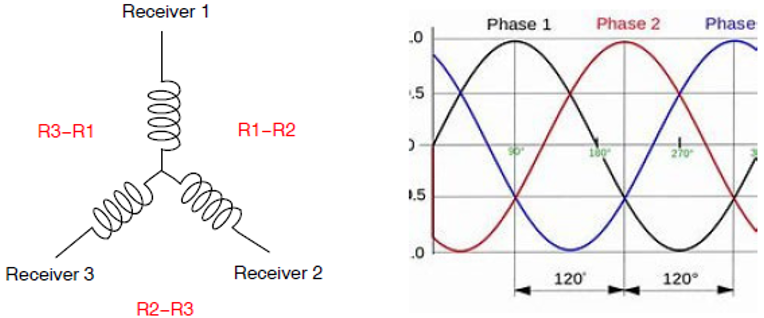
NCS32100 ADC接收到的信号说明:
- 在8路ADC中,前3路负责高密度的齿轮状感应电压信号解码,后3路负责低密度的电压信号解码。
- 高低密度的3路信号采电子周期各120度的相位差方式设计Layout。
- 会在每个不同的马达位置得到不同的3相高频信号及3相低频信号。
- 再将这6个不同时间/准位的信号混合解析后就计算出当下的绝对座标值。
- 另外,IC本身带信号增益补偿及数位滤波功能。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100在电子周期里找到机械周期的绝对位置说明:
- 马达转一圈等于一个机械周期,但一个机械周期可能是数个或数十个电子周期所组合而成。
- 电子周期会是在机械周期的那个位置可能得在走线粗环感应线圈上做微小的差异化来辩识。
- 如下图,以固定的圆形来比对就会发现感应线圈在不同位置有不同的间距,他可能出现在转子的低密度齿轮状也可能出现在定子的低密度线圈。
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
车规版 Rotary Position Sensor NCV77320(安森美电生磁感应式编码器)电气规格:
- 整合 DSP 位置运算,最高支持16位元转速分辨率
- 可设定类比输出或 SENT 输出
- 内建温度感测器
- SPI 看门狗功能
- 电源电压 5 V;耐受 −15 V 至 30 V 电压
- 透过3 V 或 5 V 微控制器实现灵活的 SPI 操作
- 最大检知转速为 10800 rpm
- 工作环境温度 −40 至 150°C 并符合汽车安全标准 ISO26262
NCV77320 线路架构示意图及说明:
NCV77320 仅配置三组旋转位置检知ADC界面,故转速度分辨率相对较低,相较于同为绝对座标编码器的NCS32100而言,规格上多了具备符合车规要求,更少的ADC界面成就了更小的解决方案材积,便能提供给使用者更多元的方案选择。
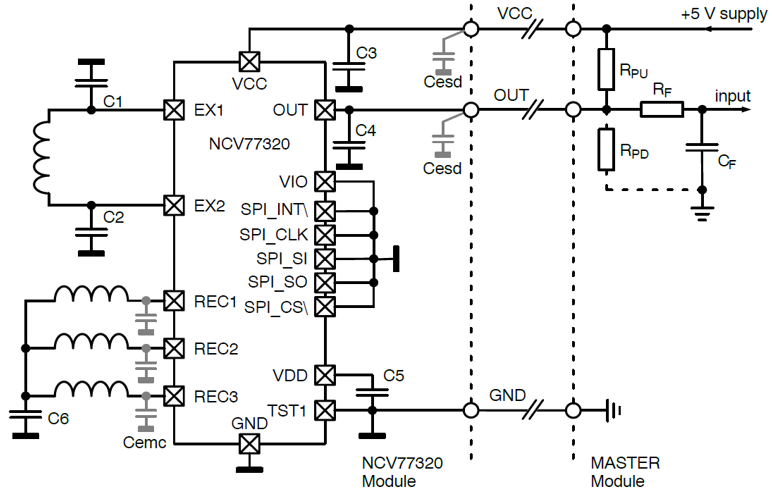
图片出处:https://salesconnect.onsemi.com/dashboard/?t=Modules
结论:
基于安森美推出的电生磁感应式编码器NCS32100与NCV77320,同属于绝对型编码器,若有低转速且需绝对座标的条件要求,具备符合车规标准、非接触方式检知可不受油污影响、同时允许相较于解角器更小的材体设计在方案成本及材积都有一定优势的NCV77320必定是最佳的选择。