一、前言
芯驰 X9 芯片,搭载多个操作系统协同运行,系统实现了仪表、空调、中控、副驾多媒体的四屏驱动控制,在人车智能交互上可以通过显示屏、屏幕触摸控制、语音控制、物理按键控制、车身协议的完美融合,使汽车更智能。让车主及乘客有更好的体验乐趣。在实际项目中客户很可能用到以太网,本文重点介绍 X9 适配景略以太网 PHY JL1111 的方法。
二、硬件检查
1. 基础电路
测量 25M 晶振波形
Reset pin 电平,依据手册描述低电平复位 PHY,软件中设置默认输出高电平
PHY 地址设置, LED0/1 两个 pin 脚用来设置 PHY 地址,举例如下图地址为 1,本次实际调试的板子地址为 0
2. 接口模式设置
JL1111 通过 8 脚 RX_DV 来设置接口模式,0:MII,1:RMII,本次调试的为 RMII
3. RMII 接口 CLK
JL1111 通过 12 脚 RXD3 来设置 CLK 输入输出,0:RMII TXCLK output,1:RMII TXCLK input,本次调试配置的为 PHY 输出 CLK
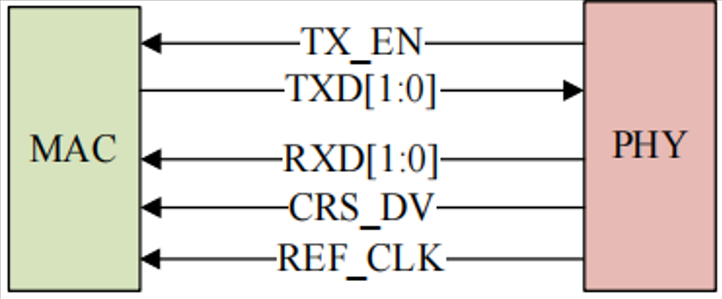
4. 数据通信接口
确认 RMII 数据通信接口
三、软件修改
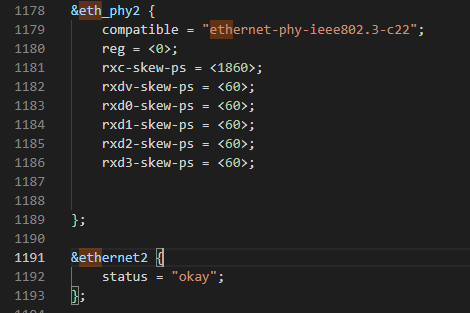
1. Dts 修改
修改 x9.dtsi 文件,配置 PHY 地址,接口类型,compatible 属性
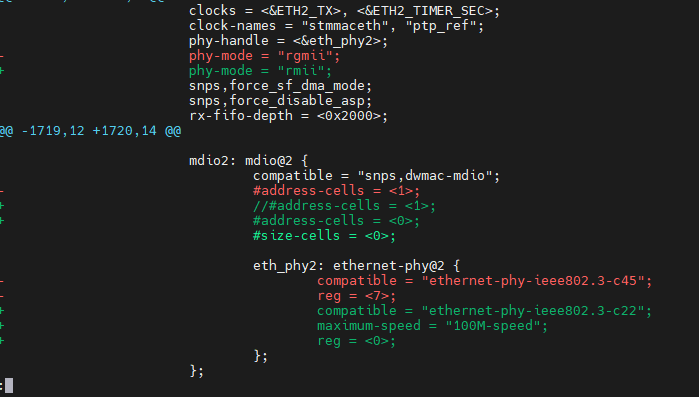
修改 linux 应用 dts
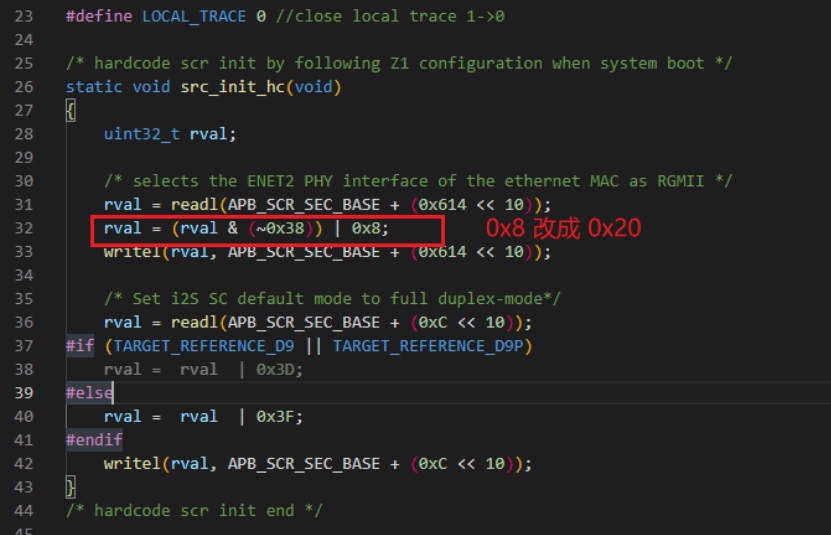
2. R 核修改配置为 RMII 模式
修改 rtos/freertos_safetyos/application/system/soc-init/scr_init.c 文件,改为 RMII 模式
四、测试
1. 烧录 pac 包
整体编译 make build_all,生成 pac 包,make genpac,烧录 pac 包
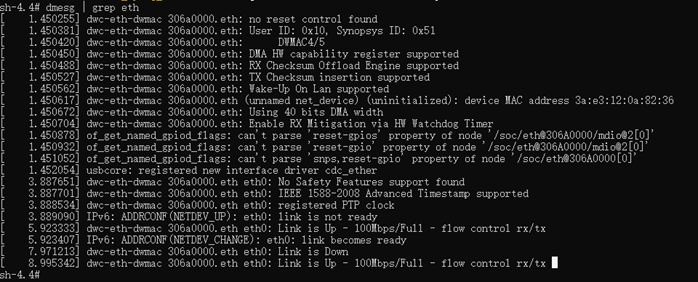
2. 开机运行
正常情况 log 如下,可以 link up
3. 配置 IP
查看电脑端 IP
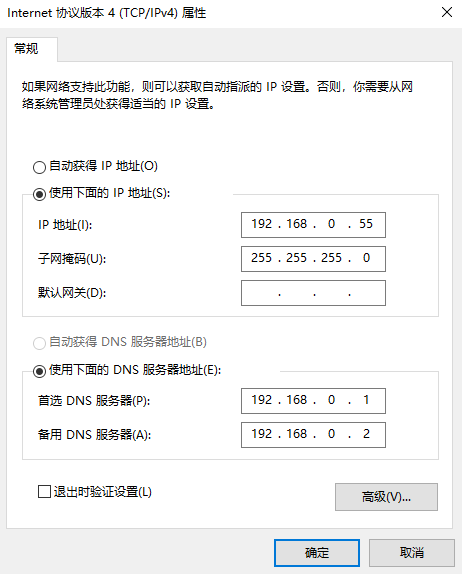
配置板端 IP
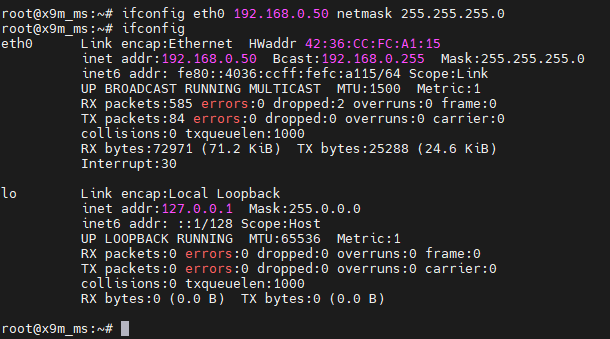
4. ping 测试
PC 与板子可以 ping 通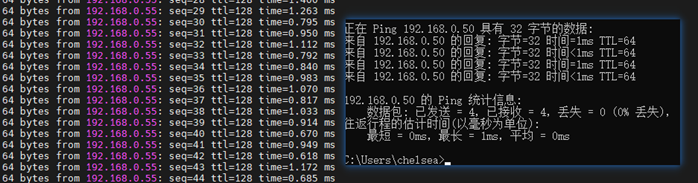
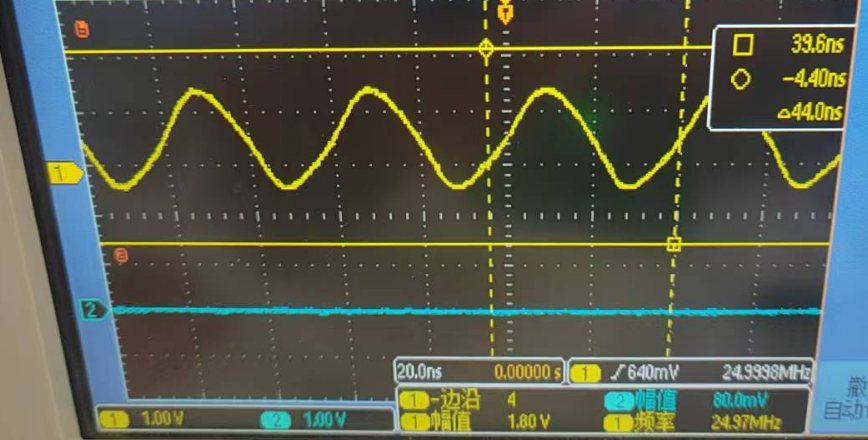
5. 波形测量
PHY 输出的 clk 波形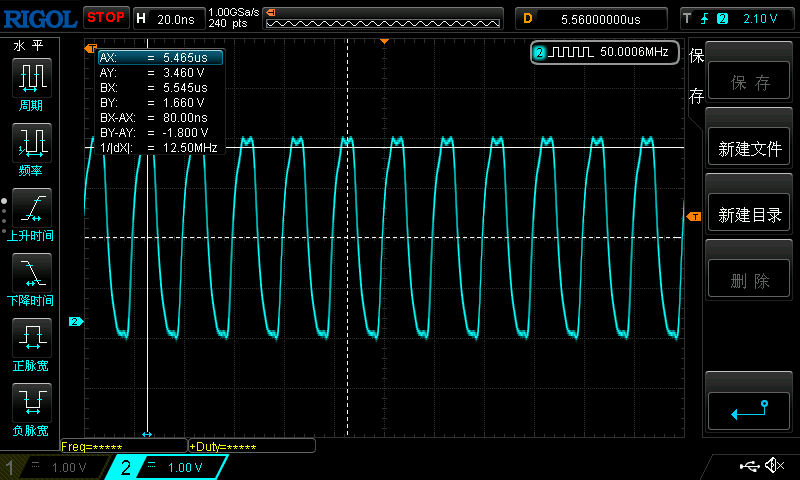
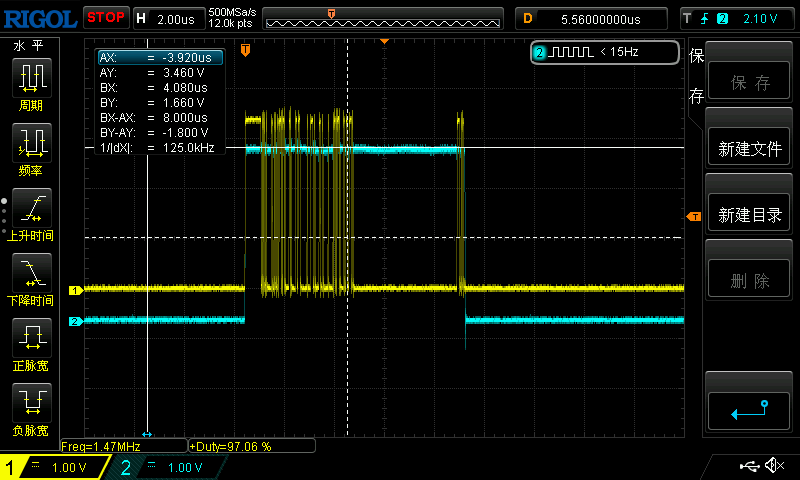
JL1111 txd 与 txen 波形
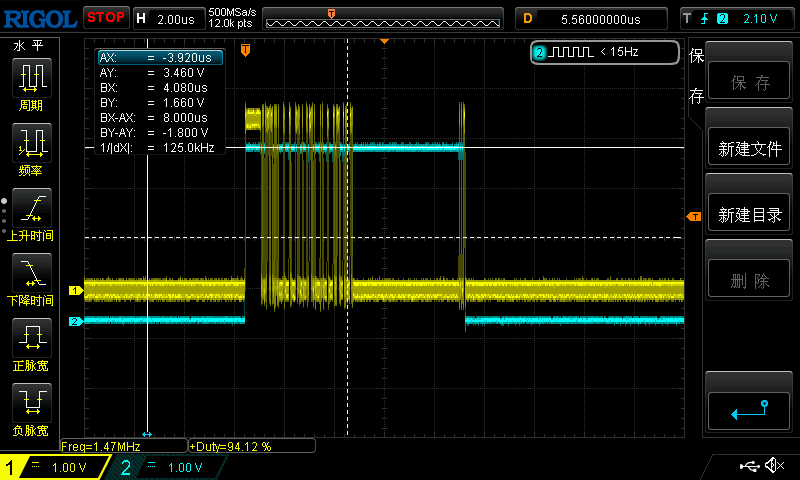
JL1111 RXD 与CRS_DV 波形
经过以上几步的调试,板子可以与 PC 互相 ping 通,调试完成。
五、参考文档
- 《Semidrive_9系列_以太网_使用指南》
- 《X9_SDK_用户手册》
- 《SemiDrive_9系列硬件设计手册》
欢迎在博文下方留言评论,我们会及时回复您的问题。
如有更多需求,欢迎联系大联大世平集团 ATU 部门:atu.sh@wpi-group.com 作者:清风
更多资讯,请扫码关注我们!