
简介
大联大世平集团针对于车用 77Ghz 毫米波雷达,推出了基于加特兰 CAL77S244-AB 的短距雷达方案。本方案应用在车身短距雷达系统,最大探测距离可达 80 米。开发板搭载的主要器件有 CALTERAH 的SOC CAL77S244-AB,杰华特的车规级 BUCK、LDO 电源芯片,NXP 的 CAN 芯片,华邦的车规级 NOR Flash 等。可以应用于前碰撞预警(FCW)、后向盲点监测(BSD)、开门预警(DOW)、舱内监测等功能,符合 ASIL B 功能安全等级。
本文主要对加特兰 CAL77S244-AB 这颗 SOC 的 SDK 文件做一些简单介绍。
1 世平 BSD 方案硬件平台
1.1 硬件框图
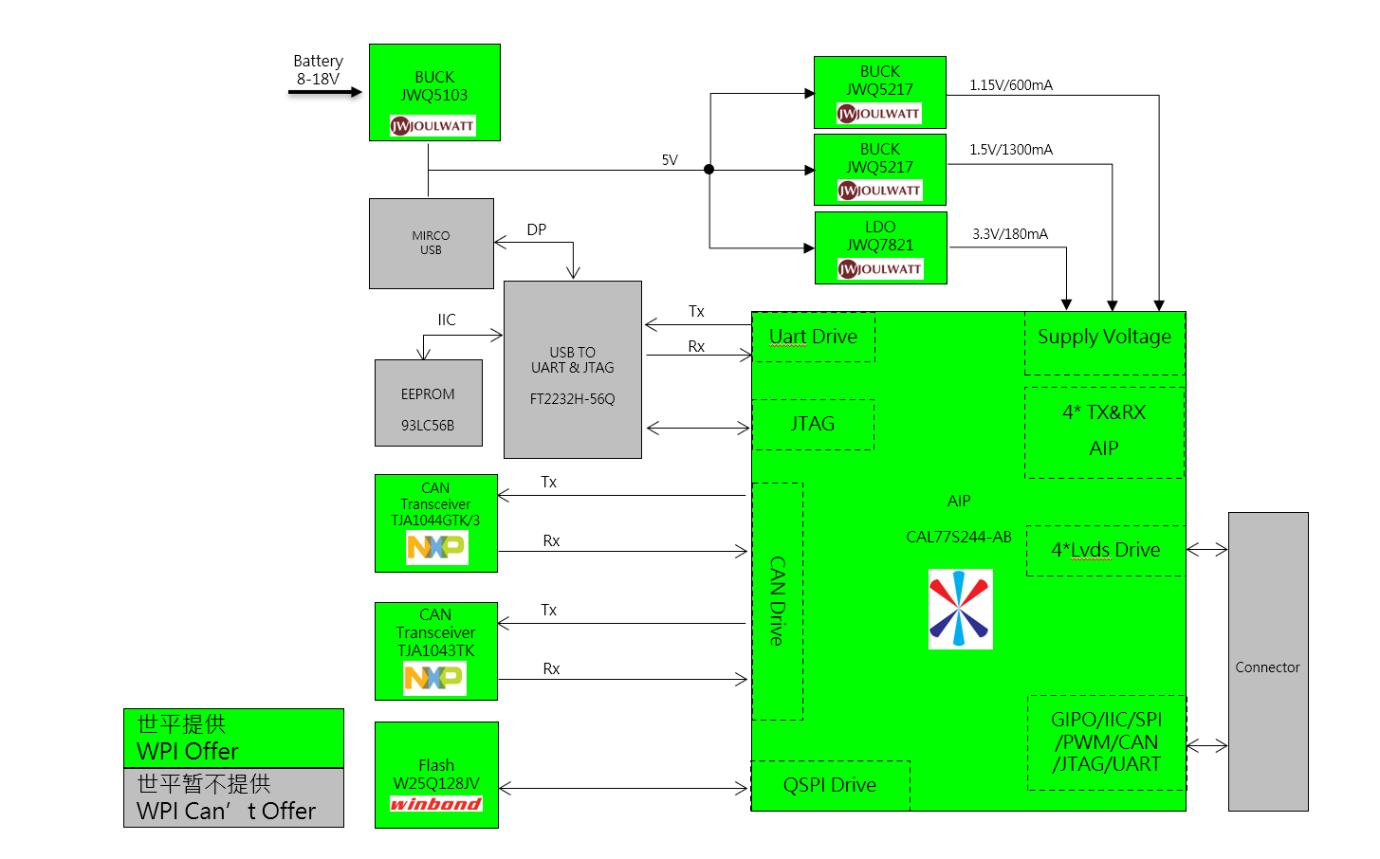
图一 方案框图
- 输入电压范围: DC 8-18 V input or USB input
- SOC: ARC_EM6 32-bit 内核,主频高达 300MHz ,ASIL-B 功能安全等级
- 输出频带 76-77 & 77-81 Ghz
- 板载 JTAG ,接入 USB 即可仿真调试
- 可连接 CALTERAH 数据采集板采集原始数据
- 双路 CAN 通讯,支持 Wake up
- 开发板尺寸 : 70 * 61.5 mm
开发板实物:

图二 方案展示板
方案链接:https://www.wpgdadatong.com.cn/solution/detail/72684
2 CAL77S244-AB SOC SDK FILE NOTE
2.1下载的板级支持包包含以下文件
在加特兰官网中选择 Alps_Software_Release 下载后得到一下三个文件夹
- Firmware:示例代码,包含 bootloader 、Alps_Firmwaer 2 个文件夹。
- FPGA: CALTERAH 数据采集板的烧录 bin 文件。
- Tool:数据可视化的 GUI 上位机软件(CalterahRadarAppMgmtToolSetup.exe)
如下图所示:
图三 加特兰官网固件下载页面

图四 解压缩后的文件目录
2.2 SDK 软件框架
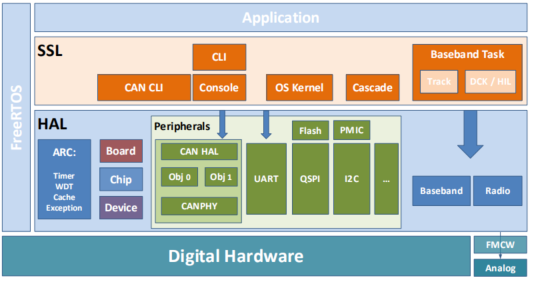
CAL77S244-AB 这颗 SOC 采用 Freertos 操作系统,将 SDK 分为底层硬件(HAL)、系统服务层(SSL)、应用层(Application)。
- 底层:包括ARC、芯片、设备、电路板、外设、基带和无线电部分。
- 系统服务层:包括操作系统内核、控制台、命令行接口(CLI)、CAN-CLI 和基带任务。SSL 主要管理数据传输、通信协议和数据处理。SSL 中的 OS 内核模块为其他系统服务、模块和应用程序层提供了一些基本如组 M 件,UTEX、信号量和队列。
- 应用层:用户可以根据不同的场景选择特定的雷达应用程序以及添加一些用户自定的功能代码,SDK 中提供了一个卡尔曼滤波演示源代码,以输出一些基本信息,包括范围、速度、角度、功率等。
图五 软件框架
2.3 SDK 文件目录
2.3.1 Alps_Firmware_Ver 文件夹说明:
- Calterah: 包含了引导程序和系统服务层的程序
- embarc_osc: 包含了 Freertos & Hal 库。
- make_bin.py: python 编译脚本

图六 文件目录
2.3.2 Calterah 文件夹
① bootloader : 引导装载程序,引导加载程序是一个独立的项目
② common :
- baseband: 基带相关的框架函数
- can_cli: CAN 通信相关函数
- console: 基于 UART 的命令控制函数
- fmcw_radio: 无线底层的 API 函数
- sensor_config: 基带配置文件 .hxx
- track:算法文件
③ freertos :
- common: 包含 UART 命令行和 Tick
- sensor: 雷达项目的主要功能,测试用例也在这个文件夹下
- validation: 验证项目的主要功能,测试用例也在这个文件夹下
2.3.3 Embarc_osp 文件夹
① arc : Soc 核心硬件驱动:初始化组装文件,缓存,定时器,看门狗,异常 api 等
② board: 包含 ref_design、ref_cascade和validation 文件夹。它们代表不同的项目,由编译参数选择
- ref_design: 单个雷达项目。包含编译器脚本和 board.c。board.c 文件在开机后和 main.c 之前初始化
- ref_cascade: 多个雷达项目级联
- validation: 验证项目。包含 ref_design 类似相关的项目,用于测试 HAL 驱动程序是否能正常工作
③ chip :
- common: Soc 延迟函数的实现 ms-delay us-delay
- configs: Soc 底层寄存器定义
- drivers: Soc 底层寄存器驱动层与 IPC 驱动(核与核)
④ device :
- ip/ip_hal: HAL 层驱动程序,这是较高的层驱动程序
- ip/designware: PHY 层驱动程序,这是较低的层驱动程序
⑤ options: make 文件
⑥ os : FreeRTOS 源代码
3、API 的使用
在《Alps_ED_SC_REVMP_FirmwareReferenceManual.PDF》详细介绍了 Alps 系列 SDK 的外设应用说明。如:
- 在 Freertos 操作系统下外设初始化 & 调用的步骤。
- 相关 API 函数如何使用。
- 调用 API 函数时的注意事项。
- API 函数应用相关的逻辑功能框图。
4、总结
本文介绍了基于加特兰 CAL77S244-AB 的短距雷达方案 SDK 的简要说明,主要介绍了关于 SDK 的软件框图,目录文件结构,API 的使用等相关介绍。
5、参考文献
(1) Calterah-Alps-CAL77S244-AB-Datasheet_v1.0.4
(2) Alps_ED_SC_REVMP_FirmwareReferenceManual
欢迎在博文下方留言评论,我们会及时回复您的问题。如有更多需求,欢迎联系大联大世平集团 ATU 部门:atu.sh@wpi-group.com
作者:Better Yang / 杨琰杰